Caltech Ditch Day 2017: Mission to Mars
Every spring, Caltech senior undergraduates run an event called "Ditch Day". In the weeks leading up to Ditch Day, seniors work in groups to secretly build puzzles, scavenger hunts, and other activities, called "stacks". On the day of Ditch Day, all of the freshman, sophomores, and juniors (collectivelly called "frosh") skip classes to solve the stacks built by the seniors In my senior year at Caltech, I worked with my friends Alec Brenner, Peter Lommen, and Adrian Ray Avalani to build a stack themed around mechanical engineering and Mars exploration. Inspired by Apollo 13 and The Martian, we wrote a story about a group of astronauts trapped on Mars, who must repurpose parts from their broken spaceship to build robots to solve tasks.
The centerpiece of our stack was a "life size Erector set": a set of wooden beams and metal brackets with holes drilled at regular intervals, along with steel bolts and wingnuts to connect them together. This makes it possible to build sturdy human-sized structures without power tools. We also provided four large motors with the same pattern of holes on their frames and shafts, so that remotely-controlled robots could be built.

The Parts
The basic units of building were 2x4 and 1x4 wooden beams:

Holes for 3/8 inch diameter zinc-plated steel bolts were drilled at 3 1/2 inch intervals. This interval was chosen because a "2x4" is actually 3 1/2 inches wide, not 4 inches. The holes were drilled to 7/16 inch to allow for some sloppiness in the drilling. The beams were color-coded by length using colored electrical tape.
With beams and bolts alone, it's impossible to build complex structures because all of the bolts must be parallel. In order to allow the direction of the bolts to change, we provided steel angle brackets:

The angle brackets are made from 1/8 inch by 1 1/2 inch steel bar stock, cut to length with an angle grinder and then bent with a blowtorch and vise. 3/8 inch holes were drilled at 1/2 inch intervals. The reason for such close spacing is to allow the angle brackets to hold pieces with widths that are not a multiple of 3 1/2 inches.
We built four strong motors to power robots. The motor frame has holes at the corners so that it can be bolted to a beam, and the motor shaft ends in a plate with four slots so that a beam can be bolted to it:
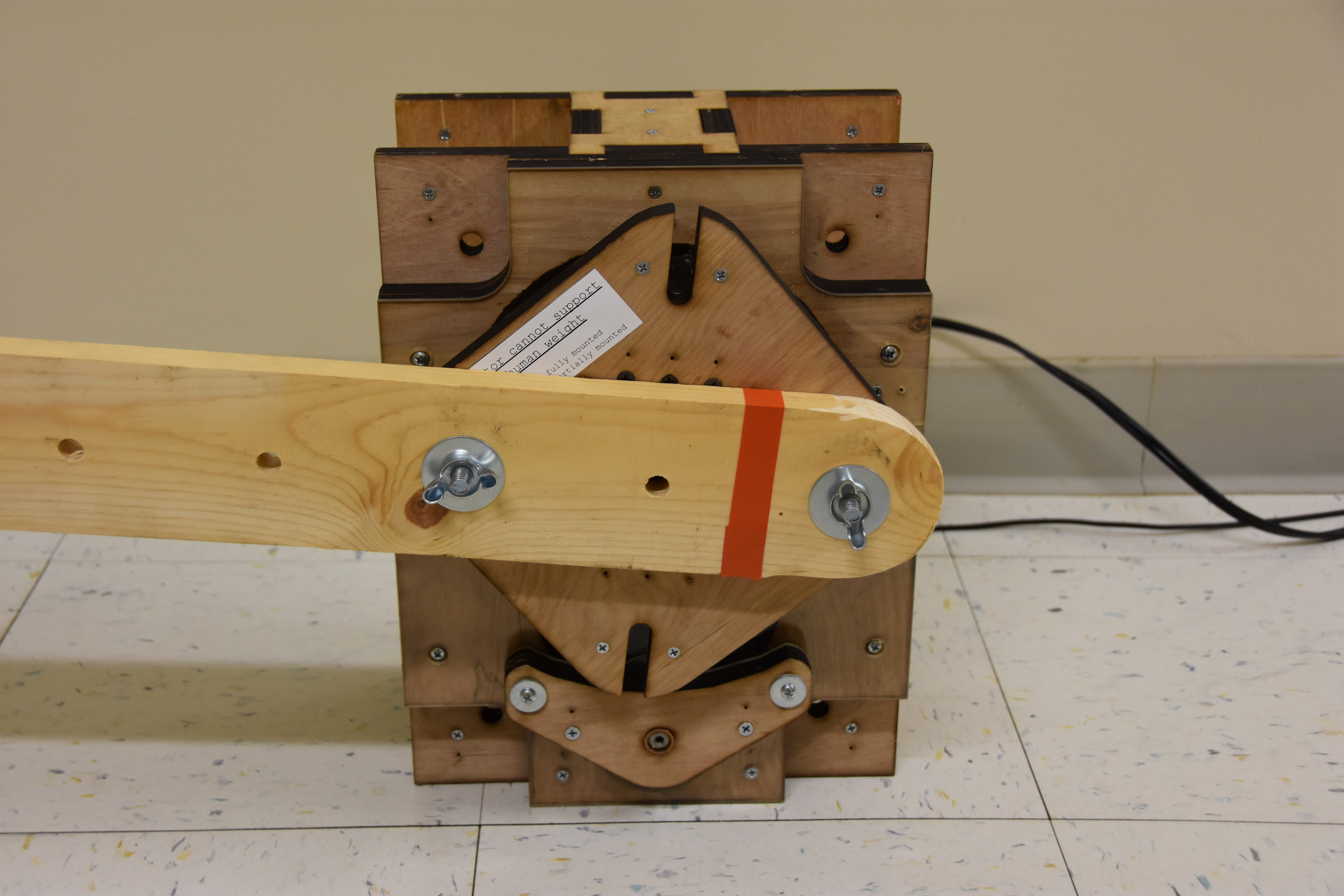
The motor frame was made from laser-cut plywood. Parts that needed to be strong were made from three layers of 5 mm plywood screwed together. The main shaft was a 7/8 inch hollow steel tube, supported by ball bearings. It's driven by a brushless DC motor and an off-the-shelf ESC. The motor is followed by a 104:1 planetary gearbox and then a 43:12 reduction using #41 roller chain, which brings it down to a maximum speed of about 30 RPM and a stall torque of about 50 N·m (37 lbf·ft).
The motors are powered by a 12V AC-DC converter: specifically, an ATX computer power supply adapted using my ATX breakout board. The power wires are 12 AWG stranded copper wire with XT60 polarized power connectors. The control signals are generated by an AVR microcontroller with start/stop buttons and a speed/direction knob, in a separate box. The controller is connected to the motor using an ordinary stereo audio cable. The XT60 connector and stereo audio cable were chosen because they disconnect harmlessly if the cable gets snagged.
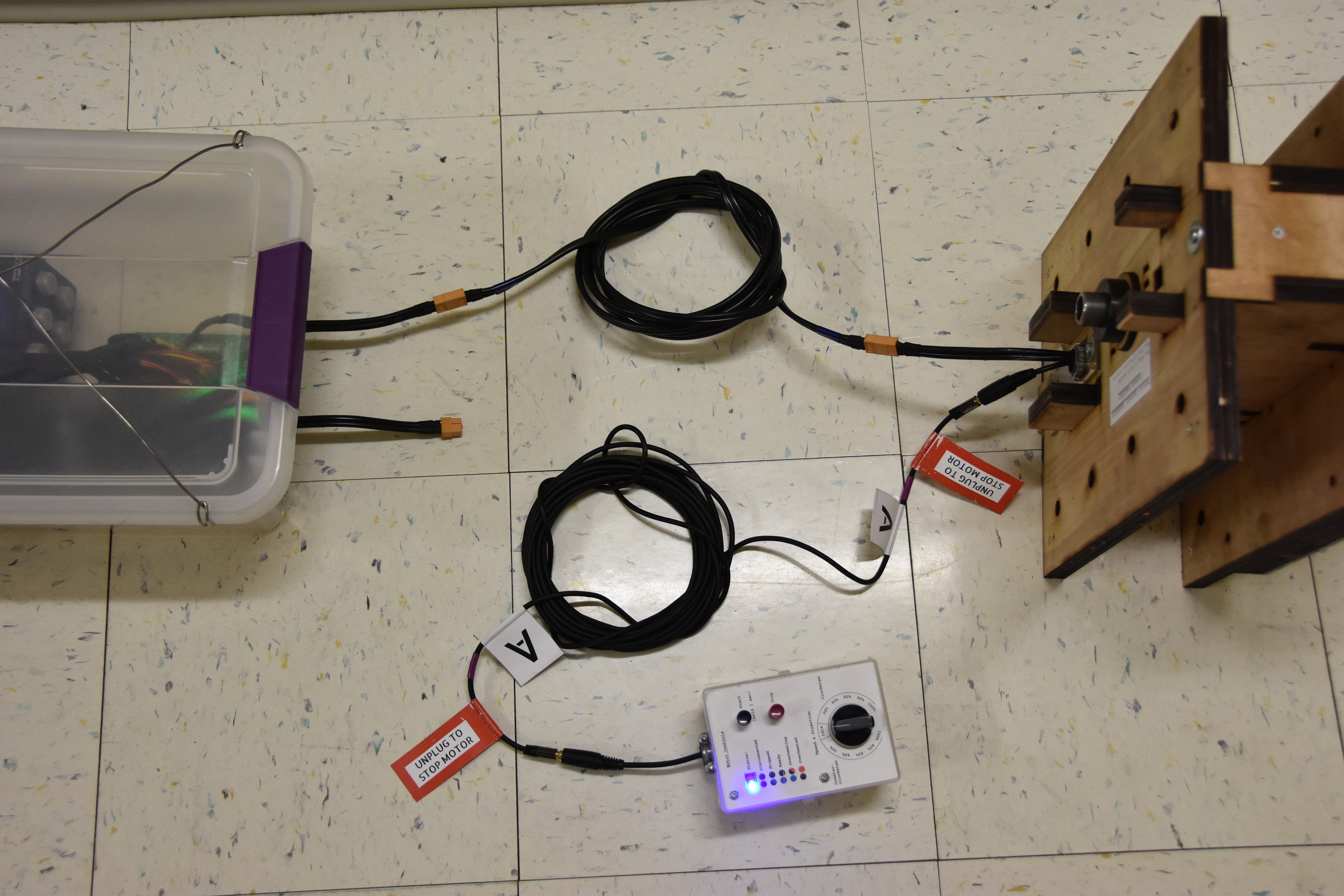
The three conductors of the stereo audio cable carry +12V power, ground, and a control signal. One disadvantage of using stereo audio connectors is that they short-circuit as they are connected and disconnected, so there needs to be a current limiter upstream of the +12V rail of the audio cable, as well as protective resistors and clamping diodes on the control wire. The control signal is a standard PWM throttle signal, except that I modified the ESC firmware to activate a pull-up resistor on the signal line if the motor is at risk of overheating. The control box detects this pull-up and blinks an orange light to warn the operator. If the temperature gets too high, the ESC firmware shuts off the motor until the temperature falls again. The ESC firmware is based on Blue Robotics' BlueESC project, which is in turn based on Simon Kirby's tgy project.
In addition to the beams, brackets, bolts, and motors, a variety of other miscellaneous parts were provided: plywood plates, a turntable, 3/8 inch threaded rods, bricks to act as counterweights, ropes and pulleys, wheels for the motors, etc.
The Challenges
The plot of the stack is that the frosh are a group of astronauts who have crash-landed on Mars and must repair their damaged spaceship. However, the spaceship's nuclear reactor shielding is damaged, making many parts of the spaceship inaccessible to humans; so they must improvise machines to complete tasks in the radioactive areas. The first major puzzle was for the frosh to build a crane that can be remotely operated using ropes, in order to manipulate "radioactive" objects:

Completing this puzzle gave them access to the AC-DC converter to run the motors. The next puzzle was to build a "water pump": a motorized device that would convert rotary motion into linear motion in order to scoop water out of a plastic tub onto the ground:

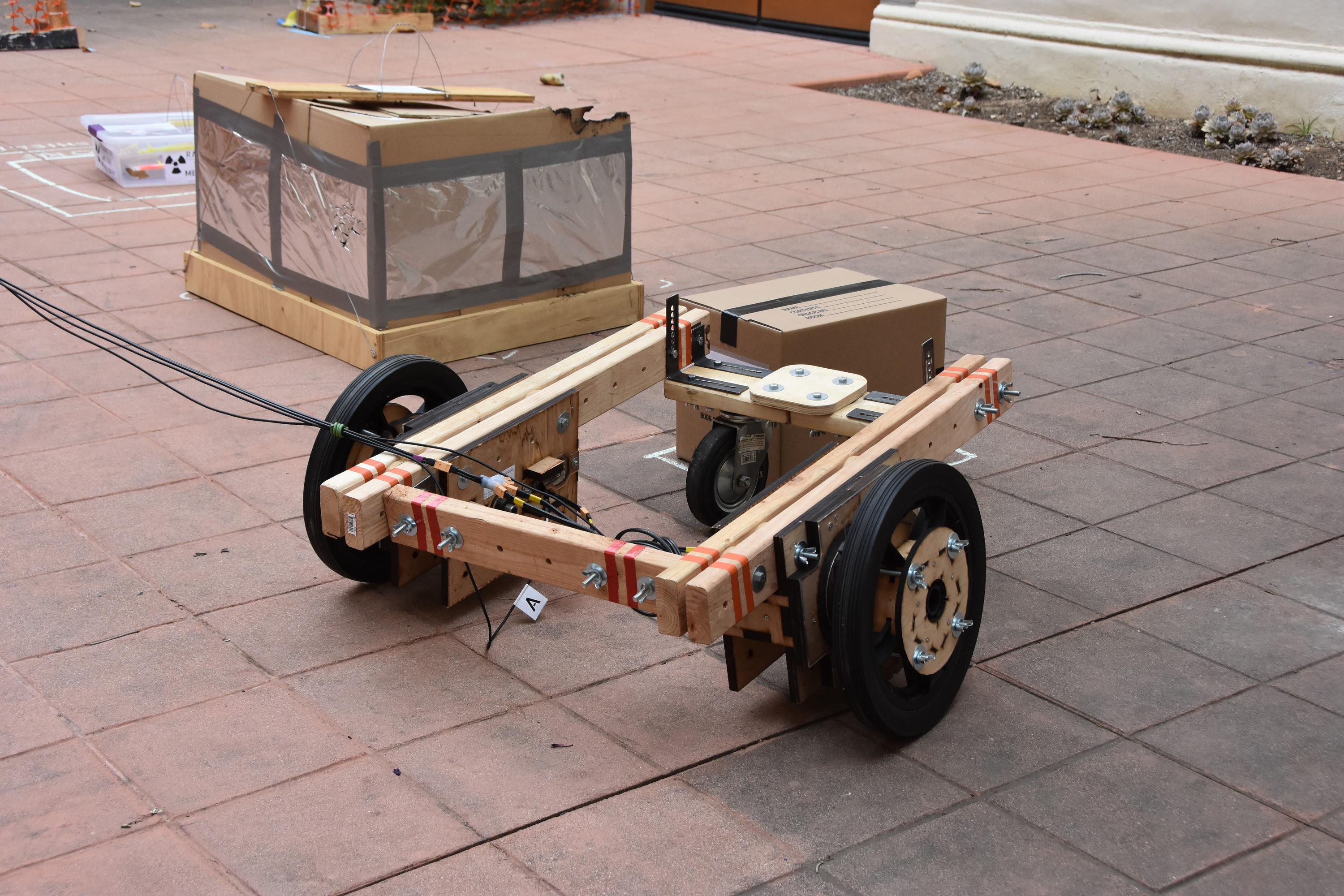
The third puzzle was to build a mobile robot that could be used to retrieve a cardboard box from the "reactor bay", which was "unsafe" for them to enter in person:

Next, they modified the robot to be able to flip a switch, and to smash a cardboard box:


The final puzzle was originally supposed to involve mounting a crane on the robot so it could be used to lift "radioactive" objects. However, the frosh found a simpler solution that involved using the robot to simply push the objects, and using their existing crane from the first puzzle to lift the objects:


When they completed this puzzle, the spaceship was "fixed" and the stack was over.
Other activities
Even at Caltech, some people don't want to spend all day building robots. In addition, during play-testing we found that the team dynamics for robot-building don't really work for a team larger than six people, but there were ten frosh participating in the stack. So we also prepared some alternative activities in addition to the engineering challenges.
To give the frosh a chance to stretch their legs, we inserted a subplot about chasing green aliens around campus:

We included a puzzle about decrypting a graphical code in order to determine the 4-digit number that opens a combination lock:

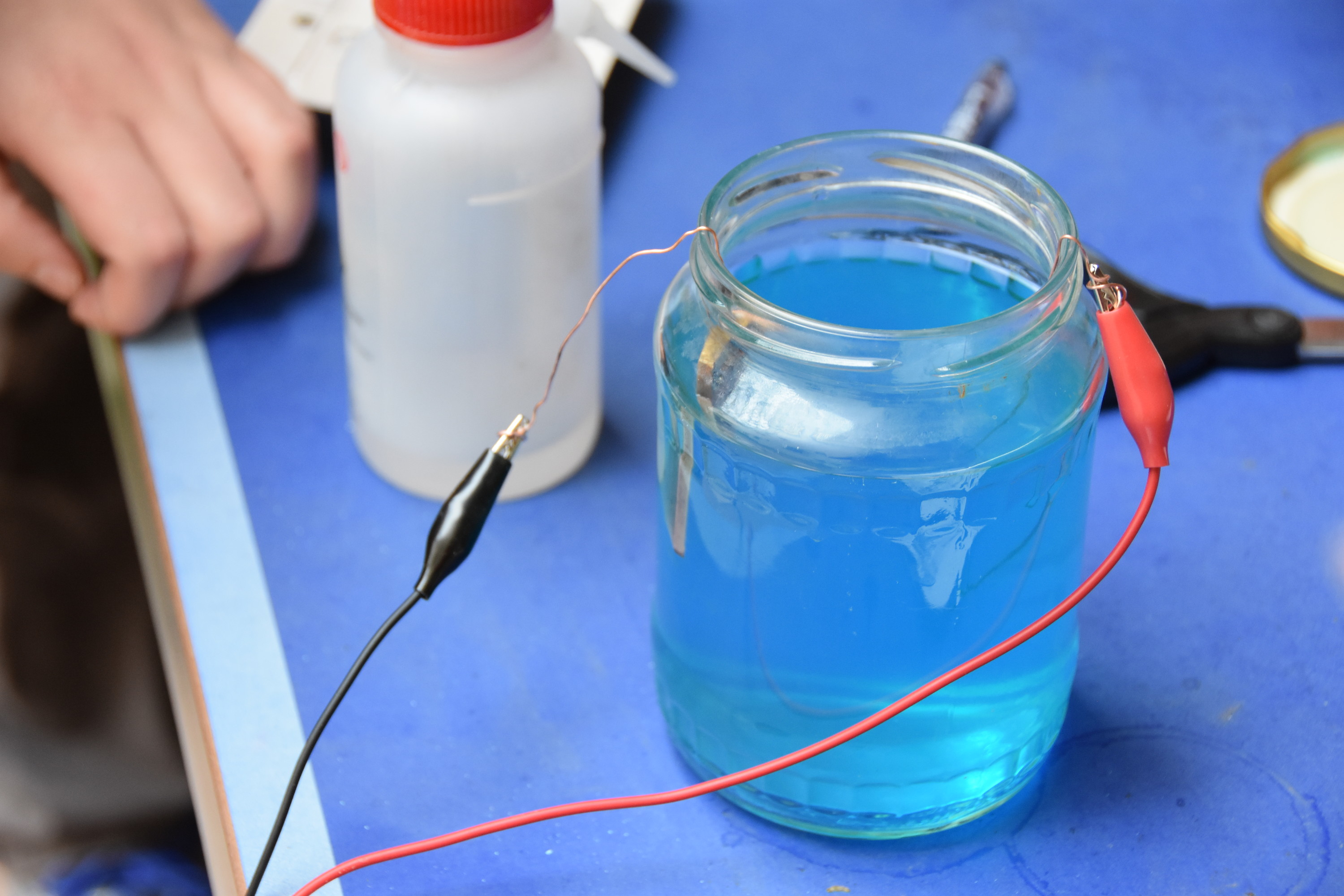
We gave the frosh instructions for how to electroplate copper onto brass using a copper sulfate solution:
We also challenged them to improvise a power source capable of lighting an LED. The solution was to build a potato battery:
